
|
Breadboard Plugins have been discontinued |
3-Phase Voltage Sources |
|
The simple phase tripler circuit on the right can be used to do a variety of 3-phase experiments. It has the same capability as the BD-3A60k 60Hz Phase Tripler kit. All resistors should be 0.25W, 1% tolerance. C1 and C2 should be 2% or 5% tolerance. The input should be a 60Hz sinewave with an amplitude between 0 and 18Vpp. The output amplitude for each phase will be the same as the input amplitude. The following changes will make the circuit a 400Hz phase tripler: Output voltage: 0 to 18V p-p, each phase output, P0, P1, P2 to common, G. |
 |
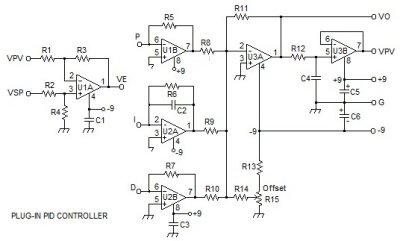
Electronic Control Systems: PID-X1 |
||
| PID-X1 Circuit | ||
 |
|
Gains are given by: With the parts included in the kit the practical range of the gains are: Kp: 1 to 100 (R5 = 100k, R7 = 2.2Meg, C2 = 1uF) |
U1A is a unity gain differential amplifier. Its output is the error voltage VE, which is the difference between the set point voltage, VSP, and the process variable voltage, VPV. The U3B circuit may be used to simulate a process with a time constant of tc = R12·C4 = 0.1 second. |
||
copyright © 2021 ZAP Studio
